


HRC-capable linear axis (ZeMA)
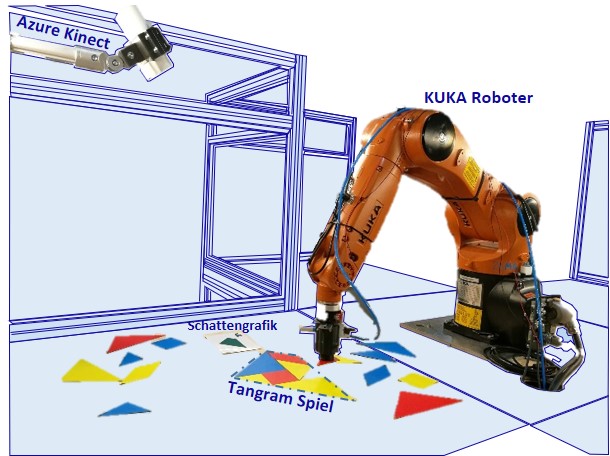
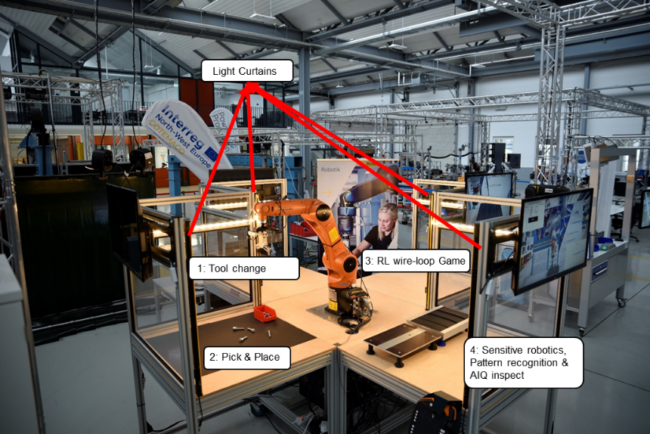
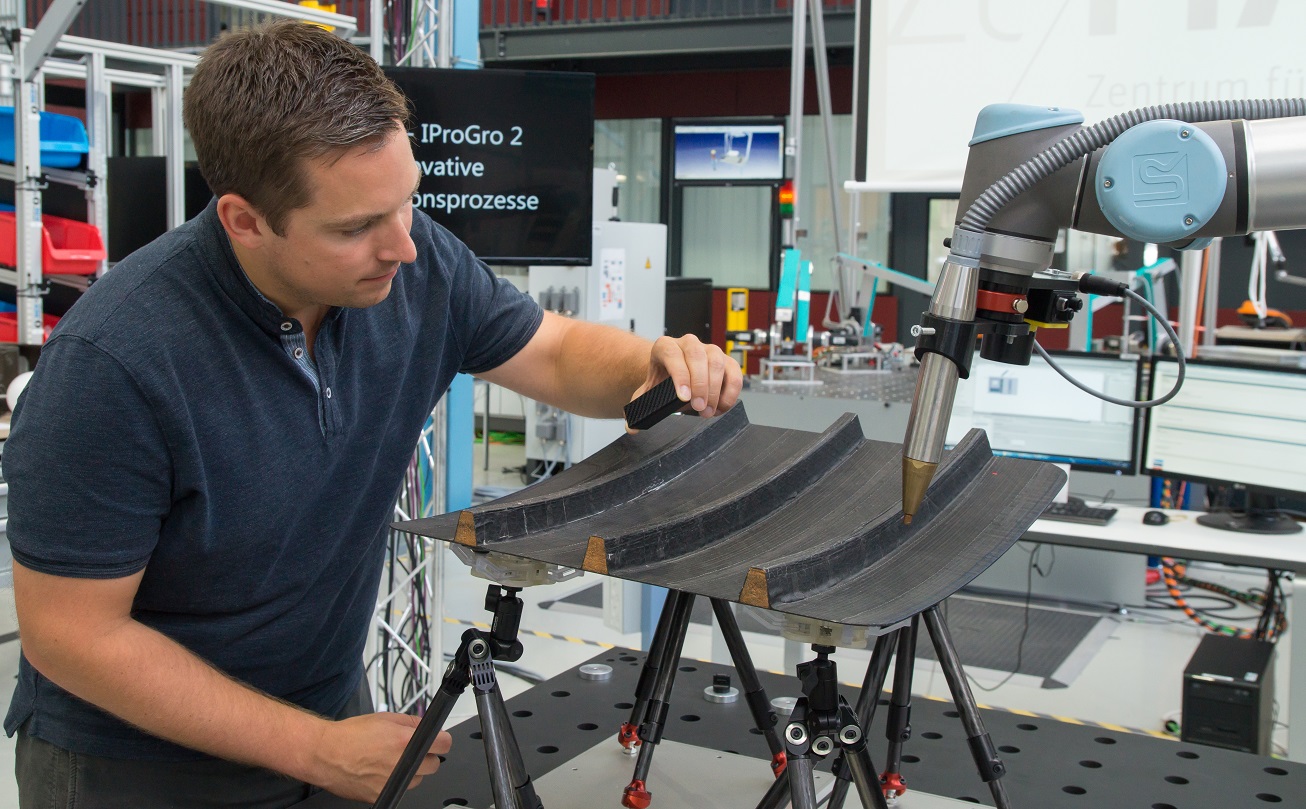
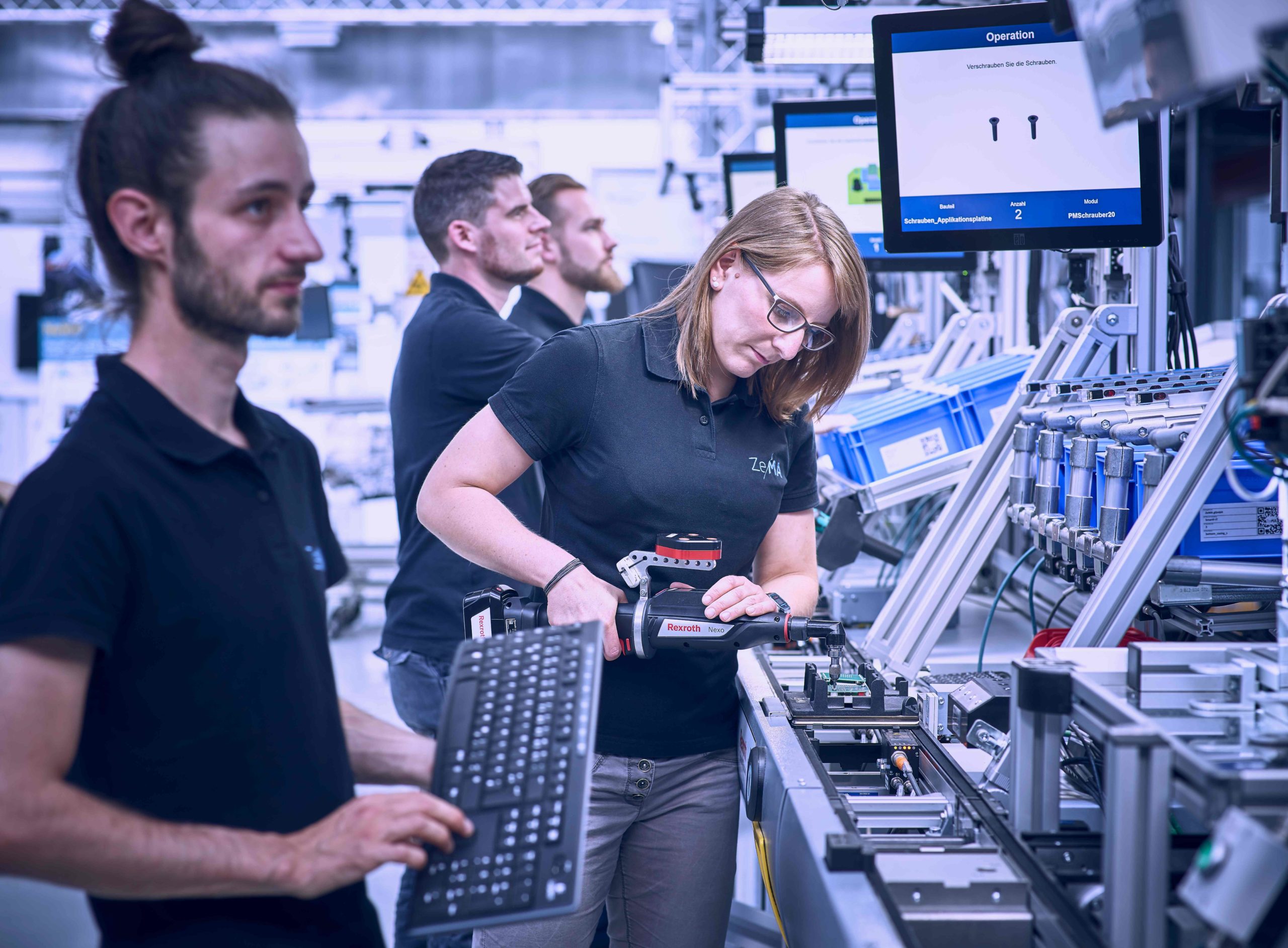
Problem A central focus in the research area of human-robot cooperation (HRC) is the mobility of robot systems. The mobility of an HRC-capable robot system is defined as the rapid expansion of the robot workspace, as well as the rapid setup of such systems. The systems available on the market up to now each have…






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}