


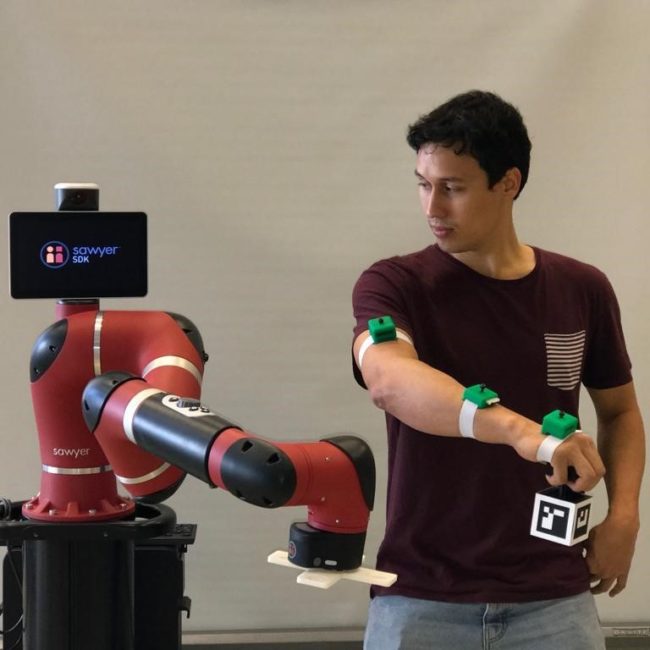
Démonstrateur pour la reconnaissance des intentions humaines (ZeMA)
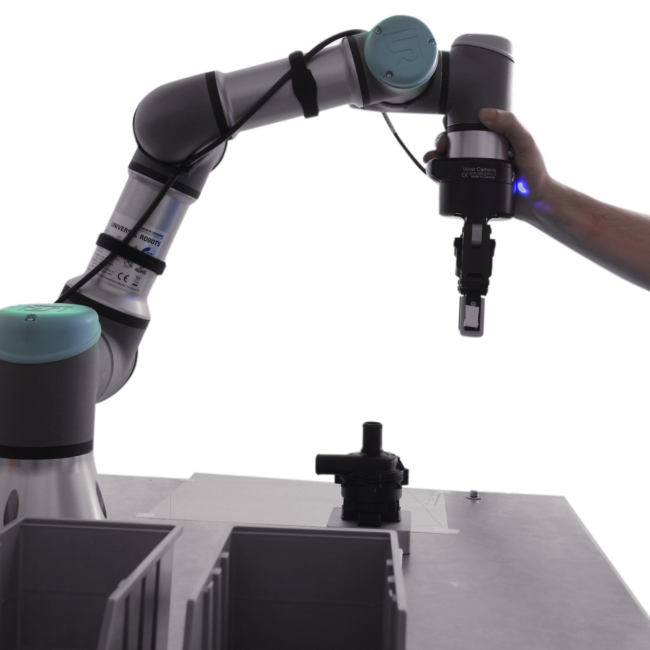
Problématique Reconnaissance de l’intention humaine basée sur la mémoire à long terme (LSTM) en utilisant les mains comme caractéristique de base d’importance. Objectifs L’action humaine de diriger le bac est prédite avant que l’objet ne soit pris dans le bac. Procédé Les pièces du produit à l’intérieur des bacs sont détectées avec une grande précision…




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}