


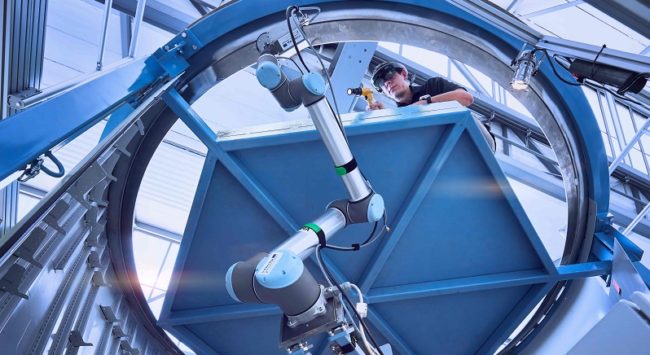
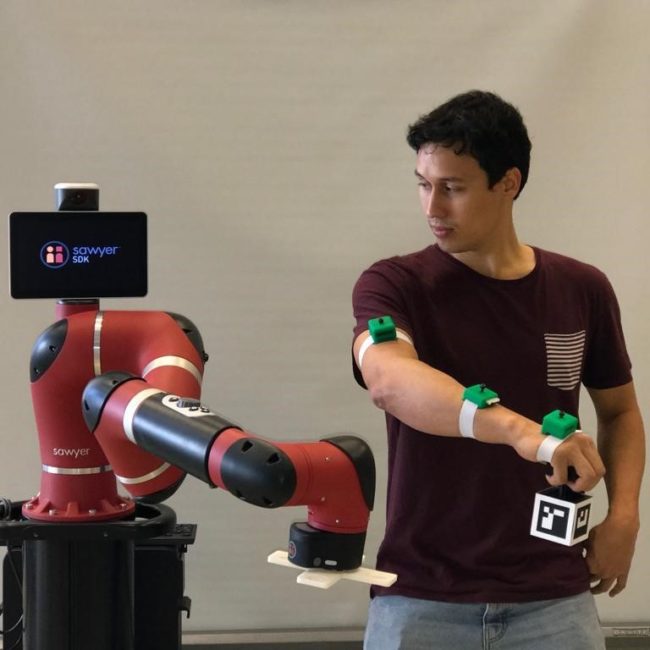
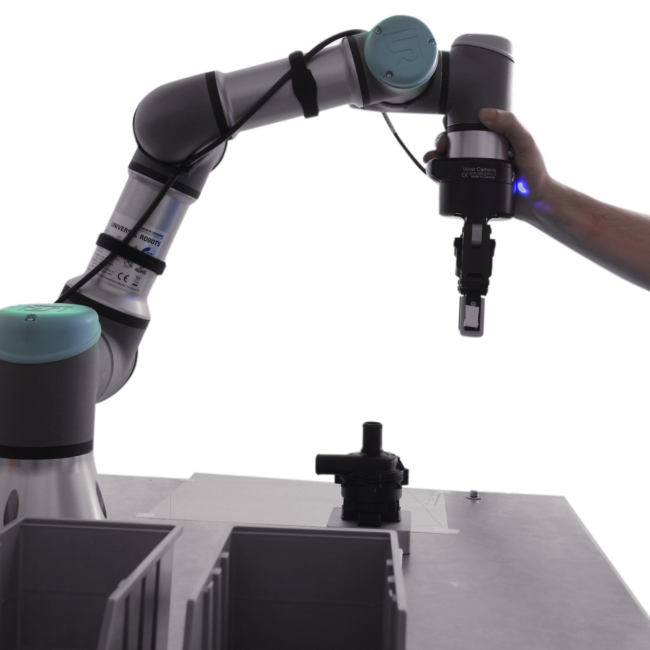
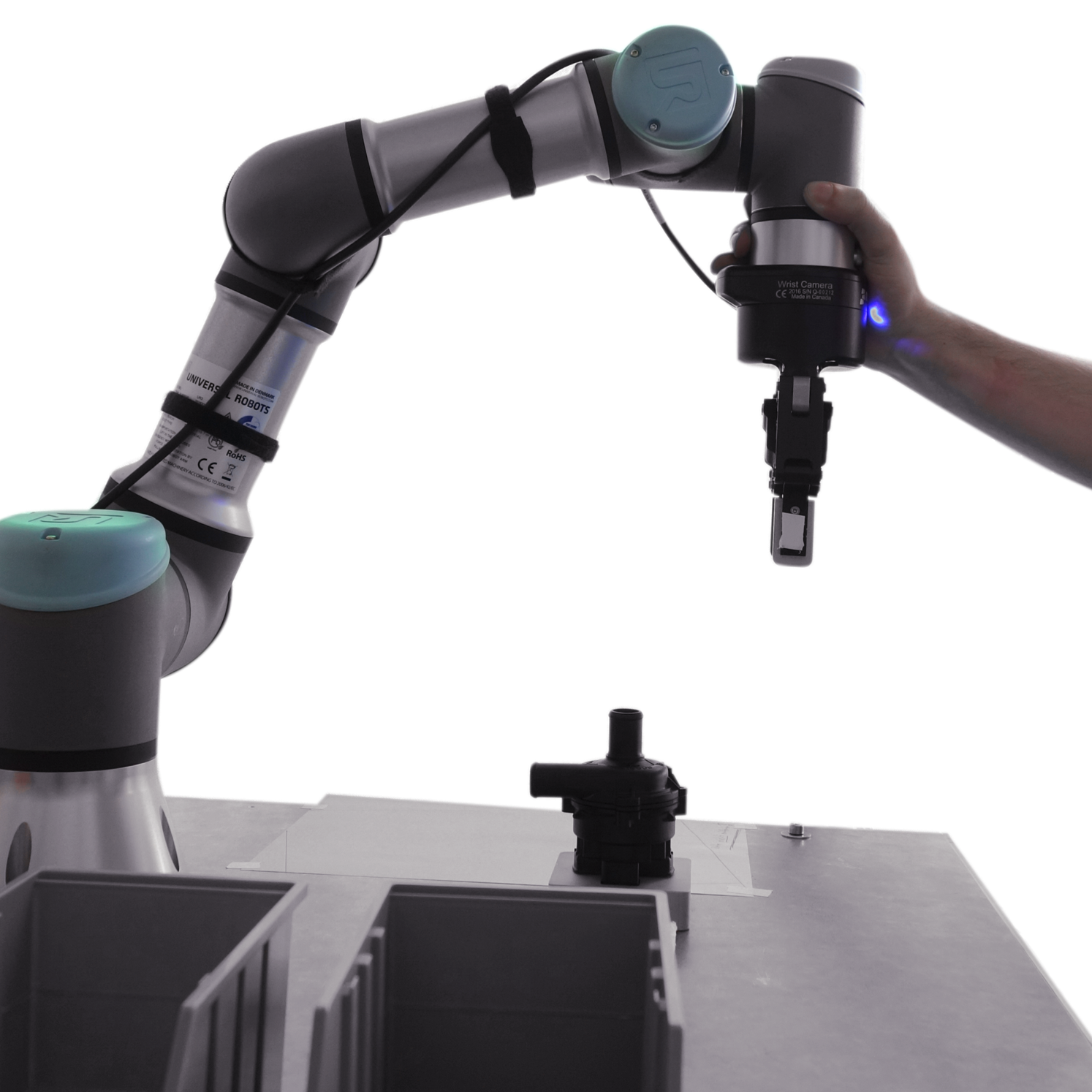
KI-basierte Qualitätskontrolle (ZeMA)
Problemstellung Qualitätssicherung findet oft unter schlechten ergonomischen Bedingungen statt. Zudem erfolgt eine Qualitätssicherung oft manuell, unvollständig und analog. Ziele Qualitätsprüfung kann während des Prozesses durchgeführt werden. Prozessparameter können dadurch schnell und kontinuierlich angepasst werden. Vorgehen Mensch-Roboter-Kollaboration in der Prozessführung, Sensordatenfusion von Kamera, Laserliniensensor und Kraft-Momentensensor sowie KI-Algorithmen. Smarte Devices zur Visualisierung. Einsatzgebiete Qualitätssicherung während des…



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}